

TSMS Real-time Displacement 3D Monitoring System
The TSMS real-time displacement three-dimensional monitoring system consists of a robotic total station, Ethernet communication equipment, tracking monitoring measurement software, and measurement accessories. Its main functions are: it can realize command and data transmission within 600m for 1 to 6 (currently supported) or more (needs customization) robotic total stations; it supports model loading, tracking measurement, data recording, real-time display of position and attitude, and editable and exportable reports.
I. Product and Application Overview
The TSMS real-time displacement 3D monitoring system consists of a robotic total station, Ethernet communication equipment, tracking and monitoring measurement software, and measurement accessories. Its main functions are: it can realize command and data transmission within 600m for 1 to 6 (currently supported) or more (needs customization) robotic total stations; it supports model loading, tracking measurement, data recording, real-time display of position and attitude, and editable and exportable reports.
The TSMS real-time displacement 3D monitoring system consists of a robotic total station, Ethernet communication equipment, tracking and monitoring measurement software, and measurement tooling accessories.
Through the following combinations, the system can achieve:
1. One robotic total station combined with In-Check measurement software
It can realize the function of rapid automatic pointing to the measurement point, saving a lot of manual aiming trouble and saving manpower.
2. One robotic total station combined with a dock target
It can realize automatic multi-round measurements. Combined with network adjustment software, it can realize automatic measurement and error analysis of the dock control network, saving manpower and improving the persuasiveness of data.
3. One robotic total station combined with TSMS tracking measurement software
Track a single point to obtain the trajectory of motion; for example, track the position of the hull during the movement of a large segment during the displacement process to determine its displacement trajectory, ensuring the displacement progress and predicting the displacement trend.
4. One robotic total station combined with TSMS tracking measurement software
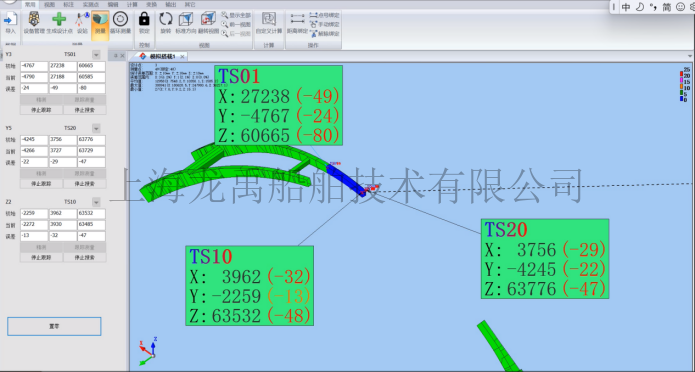
For multiple points in a small-range fine-tuning state (dock fine-tuning), cyclic automatic monitoring is performed to calculate the real-time position and attitude of the segment formed by these three points. Precise adjustment with positioning can be realized, suitable for precise positioning of small-range hoisting such as hydraulic 3D adjustment machines.
5. TSMS tracking measurement software with multiple robotic total stations
Real-time tracking of the entire dynamic measurement process can be realized, and real-time pose monitoring of multiple points forming a half-ship, ring segment, large equipment, or large structural component in the moving state can be achieved. At a distance of 5-600 meters, the current monitoring data of large equipment sliding, large structural component lifting and hoisting, large ship half-ship floating and displacement, or ring segment closing can be obtained in real time at a refresh rate of 0.5-3 seconds.
II. Application Cases
2.1 Monitoring of large equipment sliding onto a ship
In July 2021, the Three Gorges Rudong offshore converter station project consisted of three parts: foundation piles, jacket, and upper module. The upper converter station is 89 meters long, 84 meters wide, 44 meters high, and weighs 22,000 tons. The total installation location is about 213 meters away from the front edge of the wharf. To ensure safe sliding and loading onto the ship, the overall attitude of the converter station was monitored in real time, and the ship's ballast tanks were adjusted based on the monitoring data to ensure that the converter station was in the best safe state.
Three robotic total stations were used in conjunction with TSMS tracking measurement software to achieve timed and fixed-point multi-round tracking measurements, real-time mapping, and visual offset presentation of the target position and attitude, allowing for immediate adjustment of the ship's ballast and sliding speed to ensure sliding efficiency and safety.



2.2 Monitoring of lifting and hoisting of large steel structures
The Jinghe River Bridge of the Shaanxi Dongzhuang Water Conservancy Hub is a major national water conservancy project. The Dongzhuang Water Conservancy Hub project is the water conservancy project with the largest reservoir capacity, the highest dam height, and the largest single project investment in Shaanxi Province. It is the only large-scale water conservancy project under construction in China with water diversion and sand regulation functions.
The Jinghe River Bridge is 284 meters long and is a mid-span spatial Y-shaped steel box arch bridge. It presents a Y-shaped structure in both plan and elevation. The bridge structure design is novel and is the first of its kind in China. The design of the Jinghe River Bridge adopts a combination of single and double arches, with a main and secondary arch combined stress mode and a spatial three-dimensional curved arch, making construction extremely difficult.
The construction party used three robotic total stations in conjunction with the TSMS tracking measurement system to conduct research and practice on high-altitude three-dimensional positioning technology for weathering steel, providing strong technical support for the hoisting tracking monitoring and welding positioning of the Jinghe River Bridge.


2.3 Monitoring of large ship half-ship floating displacement and dock positioning, and pose monitoring of large ring segment closing
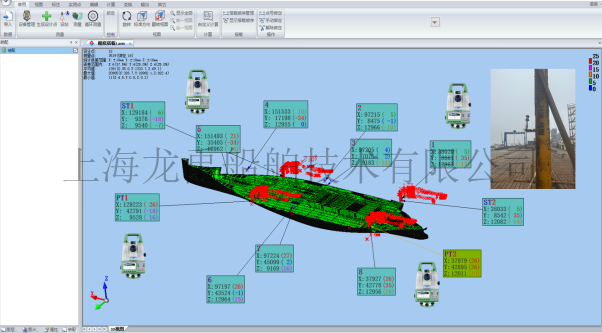
In the application of half-ship floating displacement and dock positioning, a half-ship that has been built is towed from another location to the factory dock. The half-ship is approximately 200m long, and the real-time process of entering the dock is monitored to guide precise dock positioning on site. This method is also applicable to pose monitoring of large ring segment closing.
Four 360-degree prisms are set up on the hull. According to the hull benchmark, the three-dimensional coordinates (X, Y, Z) in the hull are determined by on-site measurement. The hull coordinates of the dockside rotating target at the dock are determined, and a three-dimensional coordinate system consistent with the hull is established. Four total stations are used for on-site orientation and networking to unify the coordinate system. The robotic total station tracks the prism target and monitors the displacement data changes in real time, guiding the dock positioning adjustment on site.
The entire monitoring process, from entering the dock to dock positioning, took 6 hours. The final dock positioning accuracy was better than 15mm, effectively ensuring the accuracy and efficiency of ship movement and dock positioning.


Company Address: Room 201, Building 11, No. 299, Bisheng Road, Pudong New District, Shanghai
Company Telephone:021-33830252
Company Fax: 021-33830253
Company Postcode: 201204
Company Email:service@shipac.com.cn